01
The setup
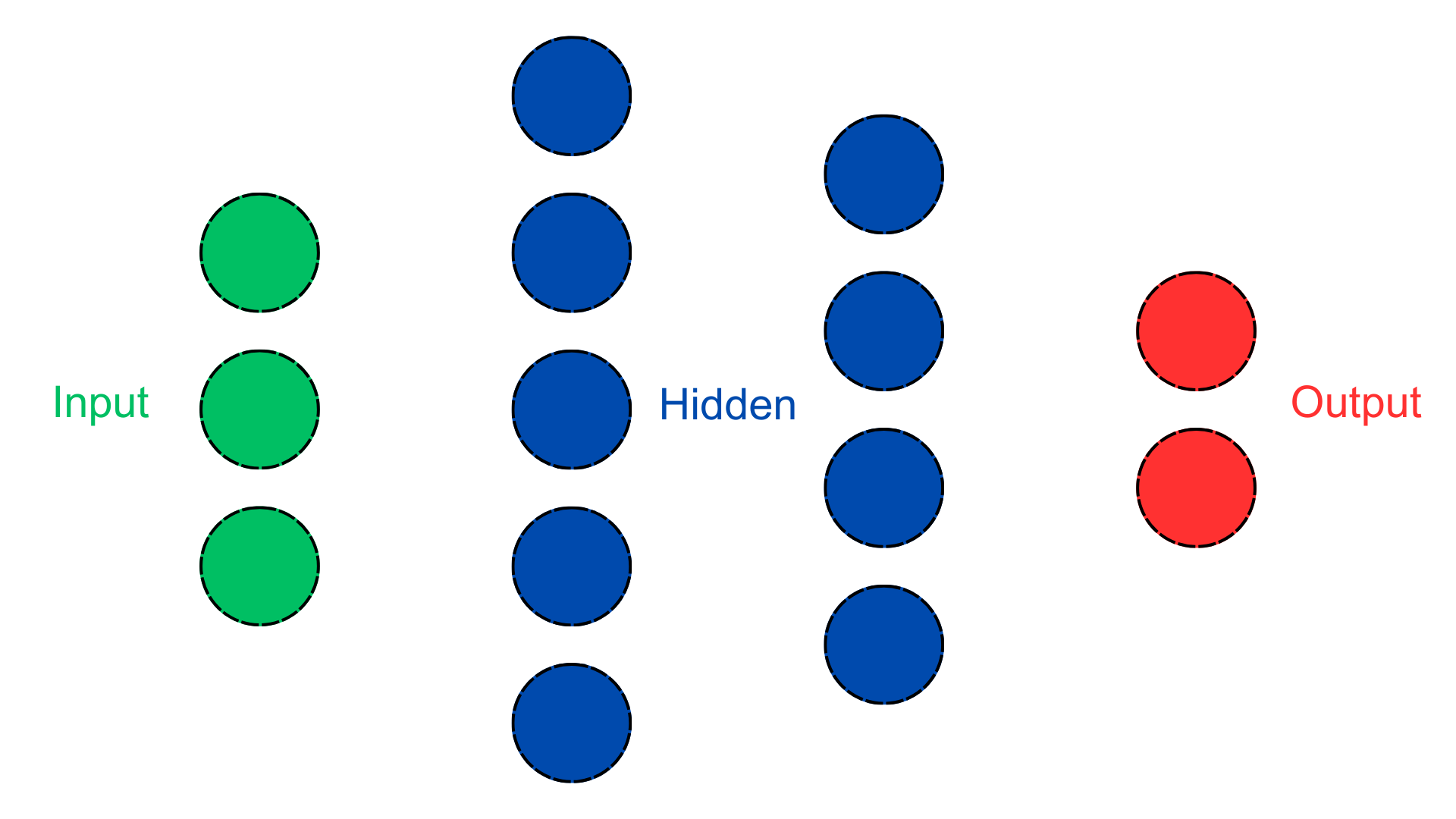
Each car gets a small neural network and a fitness function that rewards distance covered along the track centerline. There is no supervision and no gradient descent on the network itself - the training loop is a generational evolutionary algorithm: select top performers, copy them, mutate weights and biases by a configurable amount, evaluate the next generation, repeat.
The whole loop is configurable from the inspector. Layer sizes, population size, mutation rate and strength, track topology, evaluation episode length. The point of the project was less to produce a top-line driving model and more to make the geometry of behavior legible - to actually watch a behavior emerge from variation and selection rather than from a loss surface.